Finished Projects:
|
|
| |
Robot Control with Actuator Saturation
More details |
|
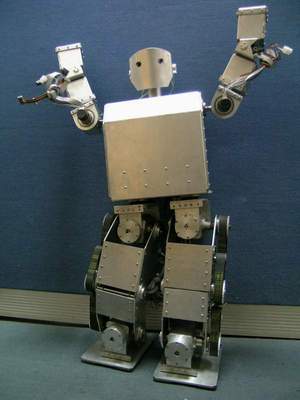
Humanoid robot design and control
More details
|
|
Study
on Multimodal Human-Robot Interaction
More details
|
|
Face Detection & recognition
More details
|
|
Robot Distributed Network Architecture(RDNA) for Internet
Robot
Objectives: A open and generic platform and interfacing solution
for Internet Robot Approaches to robotic intelligence under
Internet environment Applications: Remote operating Home and
office service robot
More details
|
Previous Research
|
|
|
Calligraphic Robot
To train the robot to imitate human's
writing process.
More details
|
|
Lab-Environmental Extensible Versatile Robot
To provide a lab-environment, low cost
and extensible mobile robot for robotic experiment and theory
test.
More details
|
|
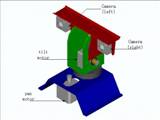
Embedded Active Vision System based on DSP
Objective: R&D an embedded system capable
to track an interesting object on the base of CCD image
Applications: Tele Conference, Robot
Guide
More details
|
 |
Robot Arm Based On USB Interface
Objectives: R&D a robot as a peripheral
equipment of PC
Applications: Home Service Robot Intelligent
Toys
More details
|
 |
Task-oriented Feature Set Learning
|
| |
Multi-sensor information fusion with various sensors in
dynamic environment
Multi-sensor fusion system (MFS) is
a complex information processing system. Several sensors
that have different functions or spatial locations are integrated
to get better information of environment. MFS has been applied
in many fields such as military, satellite, aircraft navigation,
robots and industrial assembly. Currently, the research
of MFS in dynamic environment has become an interested area
because of real application.
More details
|
| |
|