Dissertation
Table of Contents
1 标题:基于轨迹库的仿人机器人站立平衡和行走控制
1.1 摘要
基于轨迹库的仿人机器人站立平衡和行走控制 仿人机器人可以适应人类的生活和工作环境,代替人类完成各种任务, 在很多方面扩展人类的能力,具有广阔的应用前景。 仿人机器人运动控制水平的高低是决定其能否走向实用的重要因素。 虽然目前在仿人机器人运动控制方面取得了大量可喜的成果, 但其在控制的效率、鲁棒性等方面与人类相比仍有很大差距。 仿人机器人是目前结构最复杂的机器人之一, 因此凭借设计者经验为其设计各种参数化运动控制器不仅非常繁琐, 而且很难保证最终得到的控制器性能。 最优控制提供了采用优化技术设计控制器的系统方法, 但是目前采用最优控制实现的仿人机器人运动控制方法, 存在着模型过于简单和计算时间过长等问题。 因此,研究新的基于优化的仿人机器人运动控制方法具有重要意义。
对仿人机器人而言,双足行走是其区别于其他类型机器人的重要特征, 扰动下的站立平衡控制是运动控制研究的基本问题, 因此本文重点研究了基于优化的仿人机器人站立平衡控制和行走控制问题, 着眼于提高控制的效率和鲁棒性。 所取得的成果主要体现在以下几个方面:
- 从轨迹优化和构造控制律两个方面,研究了基于轨迹库的控制方法。 在轨迹优化方面,研究了多种轨迹优化方法。 为了克服单一轨迹优化算法存在的算法收敛依赖于初始轨迹或得到的轨迹违反动力学约束等缺点, 提出了一种混合轨迹优化方法。 该方法在生成轨迹方面更加鲁棒,能产生更加精确的轨迹,而且能够在生成轨迹的同时得到控制律局部近似模型。 另外,研究了轨迹优化中存在的约束处理、振铃现象、稳态值函数近似和局部最优等问题,提出了解决的办法。 在构造控制律方面,总结了采用轨迹库实现控制的方法,包括轨迹跟踪法、在线优化法和函数近似法等。
- 研究了基于优化的仿人机器人站立平衡控制方法。 针对实际的机器人控制问题, 研究了利用非线性最小二乘方法进行模型物理参数辨识的方法和基于扩展卡尔曼滤波器的状态在线估计方法。 针对目前大部分采用参数化控制器实现的方法存在性能局限、采用最优控制实现的方法计算量大且只实现了瞬间扰动下的站立平衡等问题, 提出了基于轨迹库的站立平衡控制方法。 该方法不仅能够比较快速地得到控制器,而且能够保证最终得到的控制器相对特定优化指标的性能。 在生成轨迹库时,针对如何减少轨迹库中轨迹数目这一关键性问题, 提出了初始条件自适应网格上基于控制器预测性能的轨迹库生成方法, 在减少轨迹数目的同时,满足控制器的性能要求。 以往的研究主要实现了瞬间扰动下的站立平衡控制, 而本文同时研究并实现了持续且时变的扰动下的站立平衡控制。 与基于线性二次型调节器~(LQR)~的增益调度控制器进行了对比, 仿真和实验结果说明了方法的有效性和性能优势。 由于仿人机器人由多个关节和身体部分构成,相同外力作用下站立平衡控制中期望状态的选择并不唯一。 为进一步提高控制器的鲁棒性,本文研究了期望状态的选择问题,并提出了确定期望状态的方法。 仿真和实验结果说明了方法的有效性。
- 研究了基于优化的仿人机器人行走控制方法。
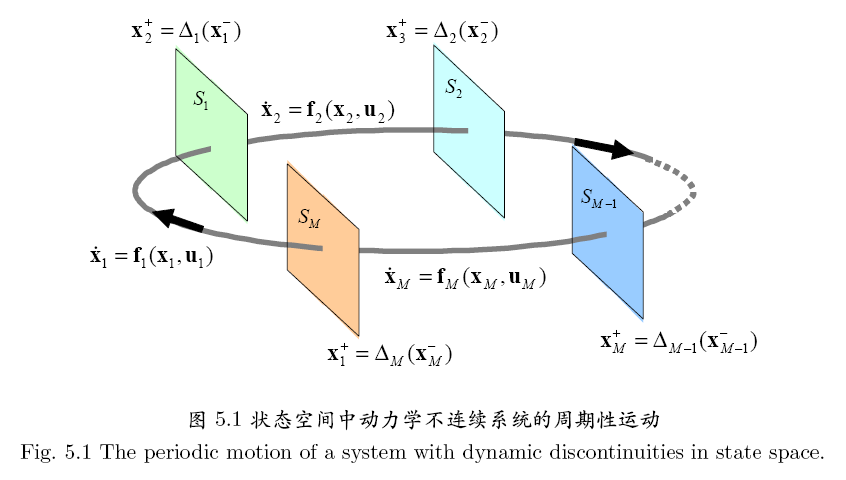
首先,把仿人机器人的行走控制问题归结为动力学不连续系统周期性任务的最优控制问题,提出一种邻域最优控制方法。
采用参数化轨迹优化方法求解周期性稳态轨迹,在推导动力学不连续处值函数的传递关系的基础上,
采用微分动态规划得到更加精确的周期性稳态轨迹和其采样状态上的控制律局部近似模型。
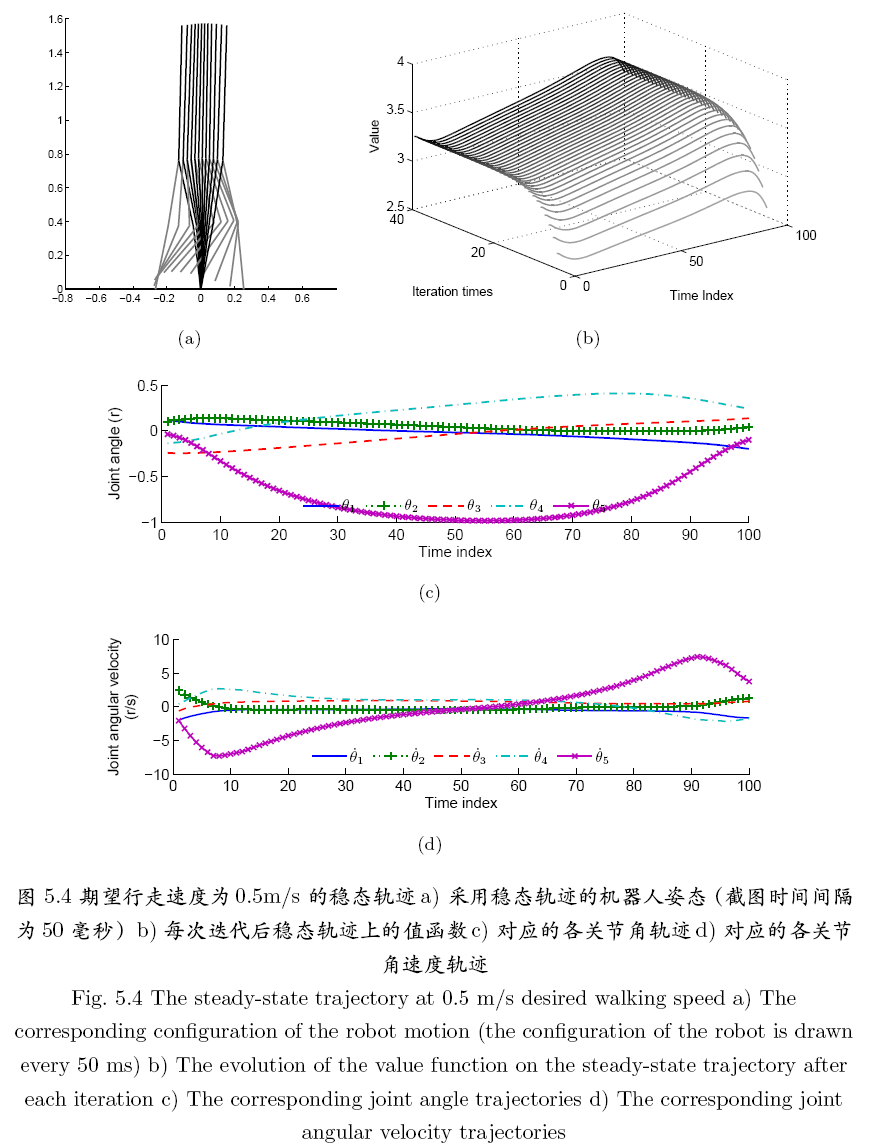
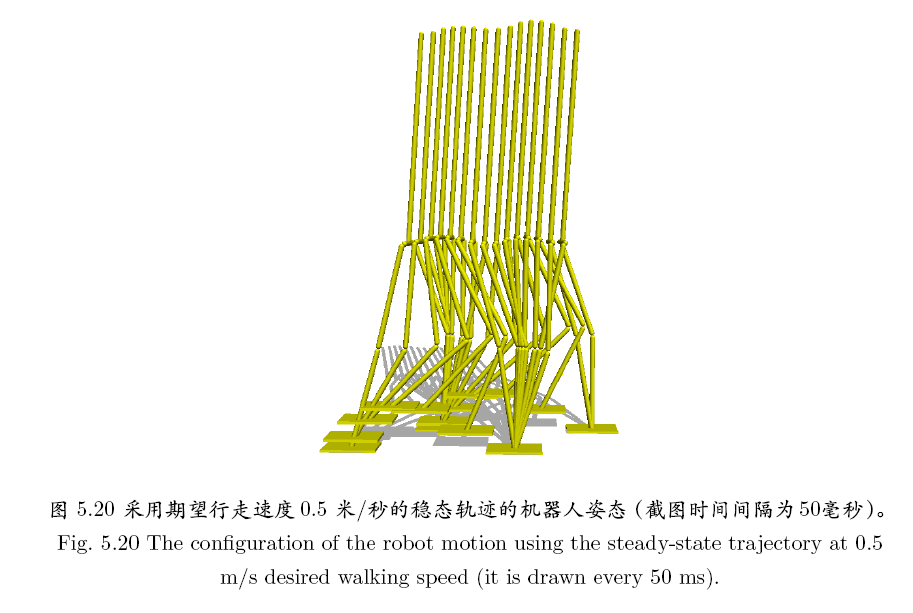
以此为基础,研究了只考虑单腿支撑的平面七连杆双足行走控制问题。
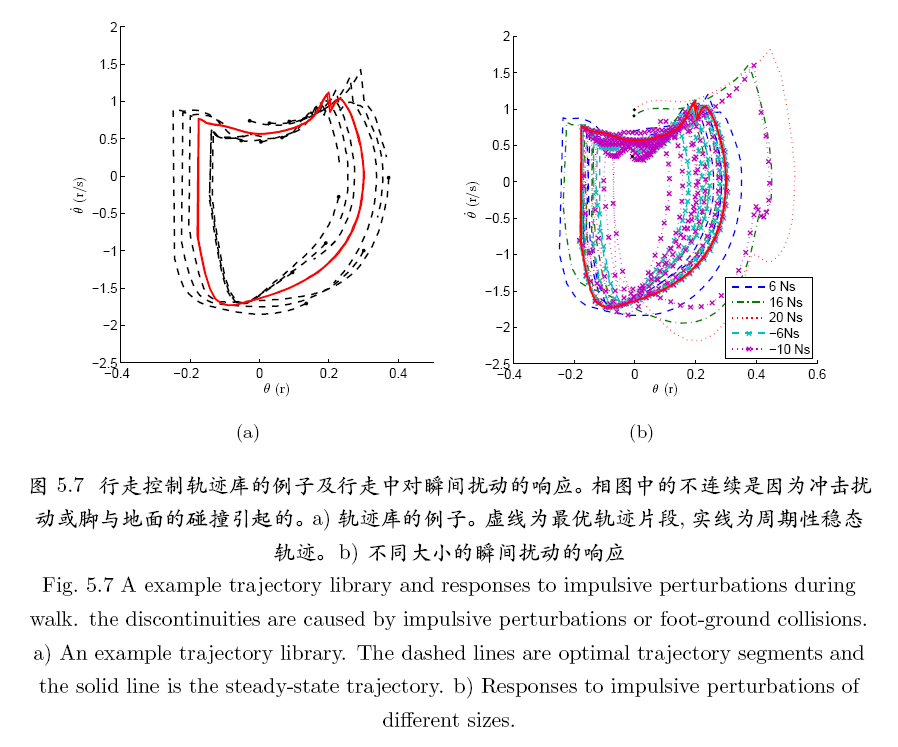
针对现有方法存在的不足,提出了基于轨迹库的行走控制方法。
仿真结果验证了方法的鲁棒性和有效性,并与基于轨迹跟踪的行走控制进行了对比,显示了本文方法在鲁棒性、性能方面的优越性。
最后,研究了更具一般性的行走控制(考虑双腿支撑阶段的三维七连杆双足行走控制),给出了稳态轨迹优化的初步结果。
关键字: 轨迹优化, 轨迹库, 仿人机器人, 站立平衡, 双足行走
2 Title: Control of Standing Balance and Walking of a Humanoid Robot Using a Trajectory Library
2.1 Abstract
Humanoid robots can adapt themselves well to human living and working environment, assist us in our daily life, and extend our abilities in many aspects. However, the level of motion control of a humanoid robot will determine its success or failure in its applications. Although there are significant successes in this field, compared with humans, these results are still limited in terms of energetic efficiency, control robustness, and so on. A humanoid robot is one of the most complicated robots. It is not only awkward endeavor to manually design parametric controllers for various motion tasks, but also hard to guarantee the resultant controller's performance. Optimal control provides a systematic way to design controllers with optimization techniques. But only applications using very simple models can be found and most of them suffer from the computation time problem. Therefore, it is significant and inevitable to study new optimization-based motion control methods of humanoid robots.
For a humanoid robot, biped walking is an important symbol characterizing it from other kinds of robots, and standing balance control in the presence of perturbations is a fundamental problem. Therefore, this dissertation will focus on optimization-based standing balance control and walking control, with an eye to the efficiency and robustness of the resultant controller. The following contributions are obtained.
- Control using a trajectory library is studied first from two aspects: trajectory optimization and control law construction. For trajectory optimization, several trajectory optimization algorithms are studied. To overcome the shortages of one single algorithm, such as the algorithm convergence's depending on the initial guess or the resultant trajectory's violating dynamics constraints, a hybrid trajectory optimization approach is proposed. It is more robust in term of finding solutions and can generate more accurate trajectories and local models of control laws at the same time. Problems with trajectory optimization, such as handling constraints, ringing phenomenon, steady-state value function approximation, and local optima, are addressed and solutions to them are given. For control law construction, methods based on trajectory tracking, online optimization, and function approximation, are studied.
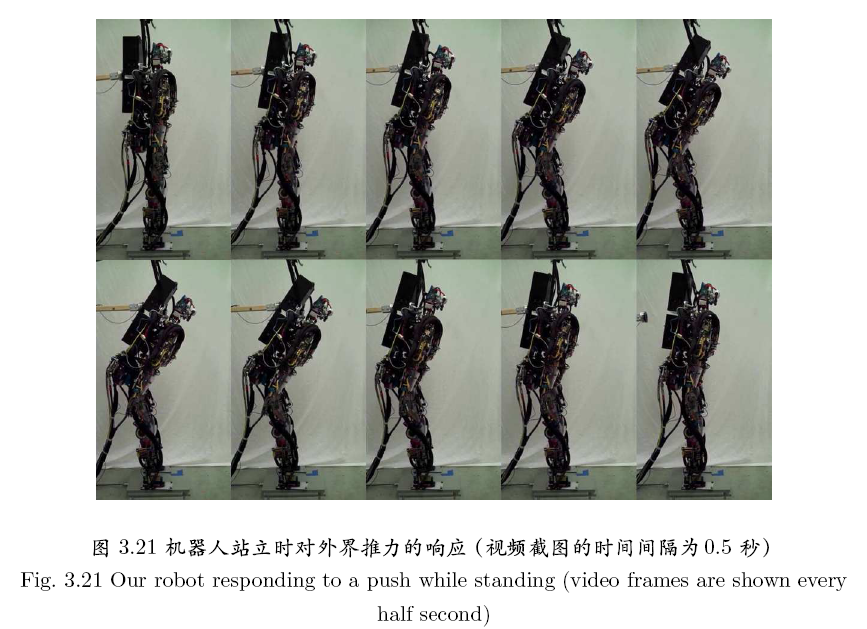
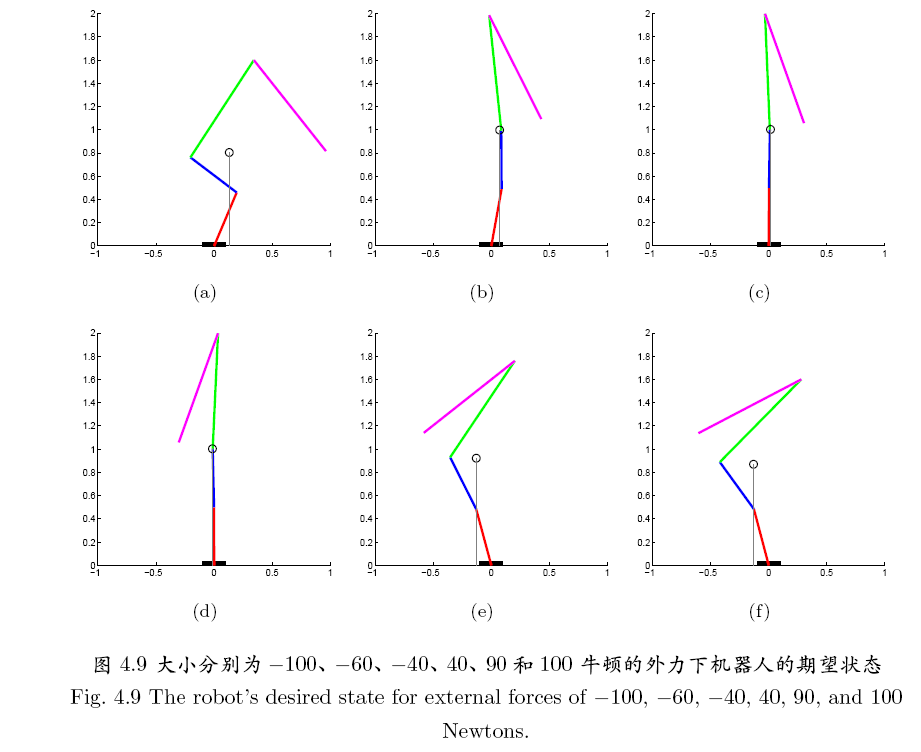
- Optimization-based standing balance control is studied. For the control of a real robot, physical parameter identification using nonlinear least square method and online state estimation based on the extended Kalman filter are studied. For standing balance control, most of parametric controllers have performance limitations, and most controllers generated by optimal control suffer from the computation time problem and can only handle instantaneous pushes. Therefore, standing balance control using a trajectory library is proposed. It can quickly generate a control law of a good performance for a specified optimization criterion. For the important problem of reducing the number of trajectories in the library, it is proposed to generate a trajectory library on an adaptive grid of initial conditions based on the resultant controller's predicted performance. It keeps the resultant library a reasonable size and also satisfies performance requirements. Most previous work assumes that perturbations are impulsive, but the proposed controller can also handle continuous perturbations that change with time. We compare the proposed method with a Linear Quadratic Regulator (LQR) gain scheduling controller. Simulation and experiment results demonstrate the effectiveness and performance of the proposed method. Since a humanoid robot has many joints and body parts, the desired state for standing balance control is not unique in the presence of continuous external forces. To further improve the robustness of standing balance control, a method to determine the desired state is proposed. Simulation and experiment results demonstrate the effectiveness of the proposed method.
- Optimization-based biped walking control is studied. First, the biped walking control problem is formulated as an optimal control problem of a periodic task for systems with discontinuous dynamics. Therefore, a neighboring optimal control method is proposed. A parametric trajectory optimization method is proposed to find the steady-state trajectory in a periodic task. The propagation rule of the value function at dynamics discontinuities is derived, and then DDP (Differential Dynamic Programming) can be used to generate more accurate steady-state trajectory and local models of the control law. Based on this result, we study the control of a planar seven-link biped walking without double-support phase. To overcome the problems of current control methods, walking control using a trajectory library is proposed. Simulation results demonstrate the effectiveness and robustness of the proposed method. The proposed method is also compared with a trajectory tracking controller. Comparison results demonstrate the advantages of the proposed method in terms of robustness and performance. Finally, the control of a 3-D seven-link biped walking with double-support phase is studied and the steady-state trajectory optimization result is given.
Keywords: trajectory optimization, trajectory library, humanoid robot, standing balance, biped walking
3 下载 (Download)
4 Figures
Email: cgliu2008 AT gmail.com
Last modified using Org version 7.5 with Emacs version 23