|
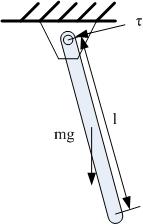
| One-link pendulum swing-up |
 ,
where 0.1 weights the position error relative to the torque penalty, and T is the time step of the simulation (0.01s). There are no costs associated with the joint velocity.
,
where 0.1 weights the position error relative to the torque penalty, and T is the time step of the simulation (0.01s). There are no costs associated with the joint velocity.
Trajectory optimization in ampl. Code here
Trajectory optimization by Matlab.Code here
Controller indexed by time takes the form

where  is the driving torque,
is the driving torque,  and
and  is the optimal trajectory, and
is the optimal trajectory, and  is the feedforward optimal torque.
is the feedforward optimal torque.
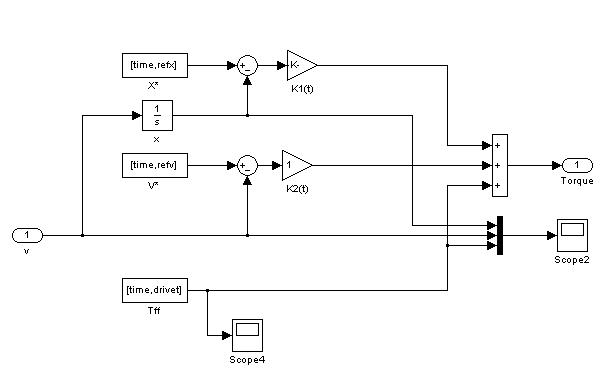 |
| Controller's structure |
Dynamic simulation where p=0 and v=0
The controller takes the form

where  is the driving torque,
is the driving torque,  and
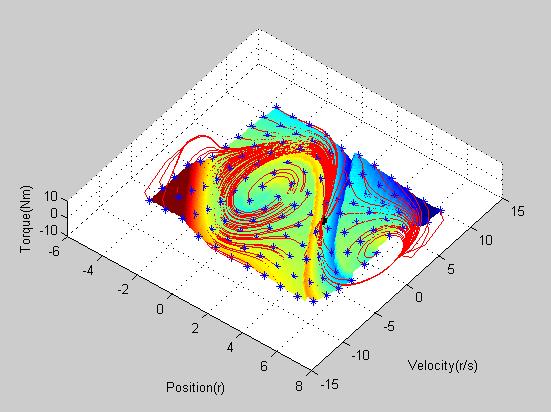
and  the current position and velocity. In order to get optimal control policy, we generate optimal trajectories from a grid of starting points and use the first
the current position and velocity. In order to get optimal control policy, we generate optimal trajectories from a grid of starting points and use the first  as the optimal control for the state at the starting point.
Each trajectory is locally optimized using SNOPT.
Information is exchanged between trajectories to enable convergence to globally optimal
trajectories 1.
as the optimal control for the state at the starting point.
Each trajectory is locally optimized using SNOPT.
Information is exchanged between trajectories to enable convergence to globally optimal
trajectories 1.
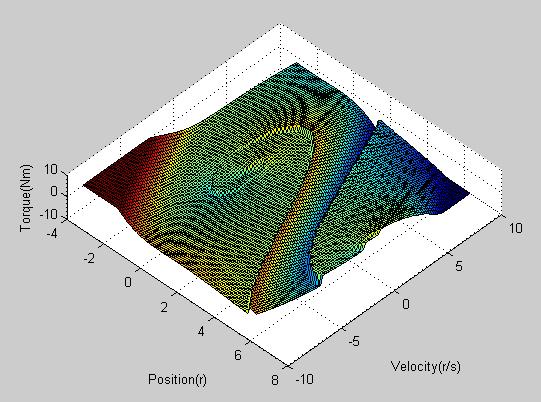 |
| Optimal policy |
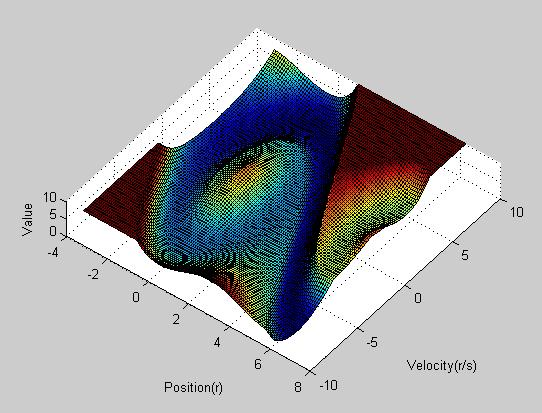 |
| Value function |
 |
| Optimal trajectory and policy |
1. Atkeson, C.G.; Stephens, B.J., "Random Sampling of States in Dynamic Programming," Systems, Man, and Cybernetics, Part B, IEEE Transactions on , vol.38, no.4, pp.924-929, Aug. 2008