|
|
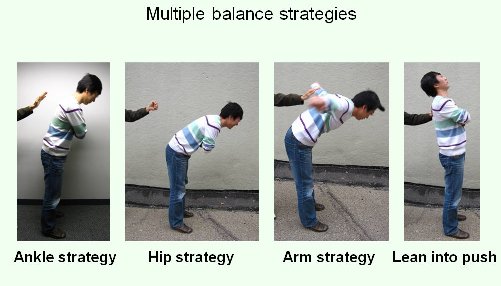
Studies of human standing balance have identified multiple discrete strategies: the 'ankle strategy', in which all joints except for the ankle are fixed and torque about the ankle joint is used to compensate for the perturbation, The ' hip strategy', in which torque about the hip joint is used to accelerate the torso and move the Center of Mass (CoM), the 'arm strategy' and the 'step strategy' when the perturbation is very large. For a constant push, humans will lean to the push and use the gravity to compensate for it. |
|
Standing balance control is an important control problem for humanoid robots. It is shown that a single optimization criterion can be used to generate multiple balance recovery strategies. We employ a library of optimal trajectories and the neighboring optimal control method to compute local approximations to the optimal control. We take advantage of a parametric nonlinear optimization method, SNOPT, to generate initial trajectories and then use Differential Dynamic Programming (DDP) to refine them. A library generation method is proposed, which keeps the trajectory library to a reasonable size. We compare the proposed controller with an LQR based gain scheduled controller with the same optimization criterion. Simulation and experiment results demonstrate the performance of the proposed method. |
Publications
- One page abstract in pdf and Poster for Dynamic Walking 2009
- Liu, Chenggang; Atkeson, Christopher G., "Standing balance control using a trajectory library," Intelligent Robots and Systems, 2009. IROS 2009. IEEE/RSJ International Conference on , vol., no., pp.3031-3036, 10-15 Oct. 2009 URL:http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=5354018&isnumber=5353884
{kind=link}
Videos
-
Two-link robot model
- Constant push of 42 Newtons at head Video
- Short push of 50 Newtons lasting 0.5 seconds at head Video
- Random pushes sequence 1 Video
- Random pushes sequence 2 Video
- Although the library is made up of trajectories for horizontal pushes, this video shows the robustness of the proposed control to non-horizontal pushes Video
-
Four-link robot model
- Constant push of 45 Newtons at head: Video
- Short push of 50 Newtons lasting 0.5 seconds at head: Our method vs. LQR controller
- Experiment video download here [avi] [wmv]