|
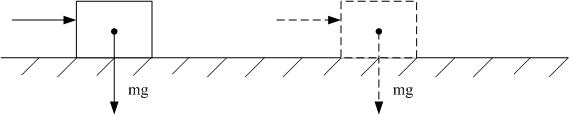
| The optimal control for box pushing |
 . Two different methods are used for this problem. See detail here
. Two different methods are used for this problem. See detail here
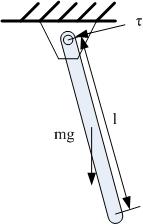 |
| One-link pendulum swing-up |
 , where 0.1 weights the position error relative to the torque penalty, and T is the time step of the simulation (0.01s). There are no costs associated with the joint velocity.
See detail here
, where 0.1 weights the position error relative to the torque penalty, and T is the time step of the simulation (0.01s). There are no costs associated with the joint velocity.
See detail here