>> English
>> 旧版主页
>> 联系我们
实验室简介
研究项目
新闻动态
交流合作
资源共享
返回首页
在研项目
完结项目
国家自然科学基金重点项目:面向服务任务的快速机器视觉与智能伺服控制(60935001)
研究内容:
现有的视觉伺服控制方法面向单个机器人相对固定的工作环境,如装配、焊接、油漆、传送等工业生产应用。在未来机器人化的智能服务家居环境中,人们期望服务机器人能像人一样大范围地移动,机器人之间能相互分享自己拥有的环境和任务信息,并能有一定的冗余稳健地操作事先未知的随机目标。考虑机器人自身的物理极限,简单的轮式移动机器人在非结构环境中存在较多的物理约束。因此,本项目试图结合网络化的图像目标快速识别(机器人之间分享视觉信息)和移动机械臂(拥有多余自由度和更大操作空间)的优势,通过构建网络化快速视觉量测信息,研究基于网络延时的视觉信息时间配准和空间配准;通过构建多视觉网络融合,将冗余运动规划任务映射到网络视觉空间中,研究在网络化视觉空间中的基于服务任务的统一的冗余度解析方案及理论框架;通过考虑网络延时的非线性不确定性,研究基于网络延时的移动机械臂群协调伺服控制理论和方法。
研究人员:
赵 玥
,
马 哲
,
柴锐之
研究关键技术:
视觉快速识别、移动机械臂控制、多传感器融合、基于网络延时的移动机械臂群协调伺服控制。
当前成果:
·机器人手眼协调系统无标定的动态跟踪方法与技术:
在不建立手眼关系模型的情况下,实现机器人手眼协调系统对运动目标的跟踪,研究了基于雅克比矩阵方法的机器人无标定手眼协调,提出雅可比矩阵模型的直接估计法、递推估计法、以及Kalman滤波方法等,解决了跟踪奇异问题。
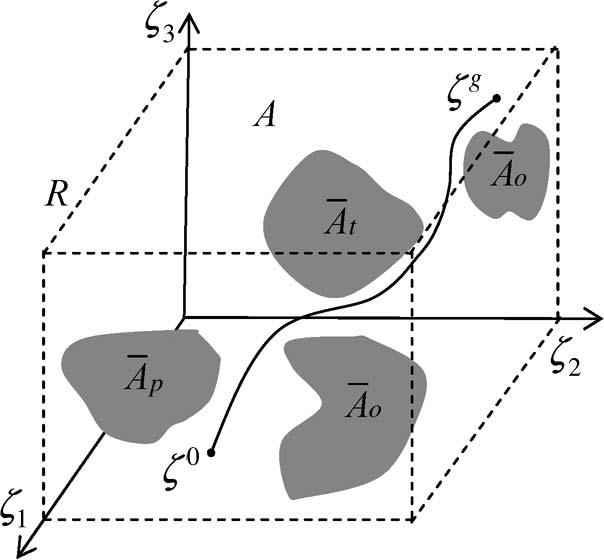
·基于表征空间的控制框架:
提出了表征空间模型的描述,定义了其中的可达表征空间,并提出了表征空间搜索方法以及考察机器人系统任务可完成性的统一框架。
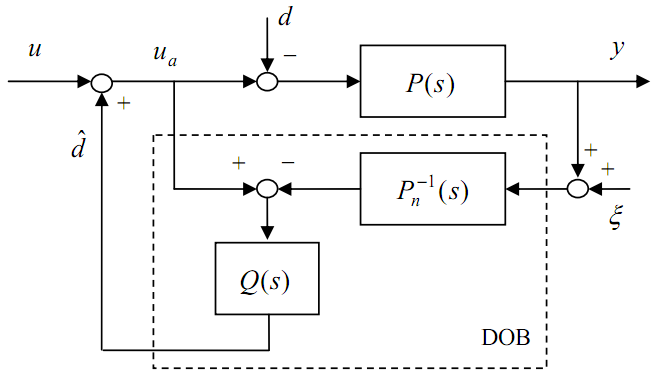
·具有鲁棒性的最优干扰观测器的系统性设计及其应用:
从干扰和噪声的最优抑制角度出发, 研究了干扰观测器最优鲁棒设计方法及其在控制系统中的应用。包括标准 H∞干扰观测器设计问题的系统性的求解方法、最优 H∞干扰观测器设计中加权函数选择的基本规则、Q–滤波器调度干扰观测器等理论研究,以及将这些理论应用于多种被控对象。
设计展望:
在NAO平台上实现基于视觉伺服的写字任务;进一步完善基于网络延时的移动机械臂群协调伺服控制理论,并将现有的所有研究理论和方法集成实现于nao机器人平台。
上海交通大学
智能机器人研究中心
版权所有
沪交ICP备05163
Email to:
电子信息与电气工程学院
©
2008-2014
RCIR
in SJTU
wwfzs1990@gmail.com