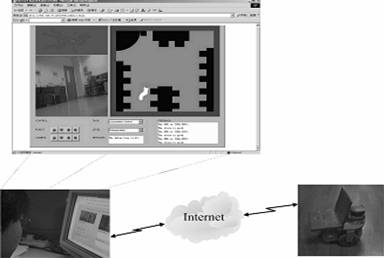
机器人自主感知模型(Robot Autonomous Perception Model):研究了遥操作网络移动机器人系统中用户意图的建模和识别,提出了基于用户意图识别的遥操作控制方法,达到了增强机器人的自主智能、克服网络不确定性对系统性能的损害的目的。
基于分布式摄像机网络的非完整约束移动机器人视觉伺服(Visual Servoing of Non-Holonomic Mobile Robot Based on Distributed Camera Networks)
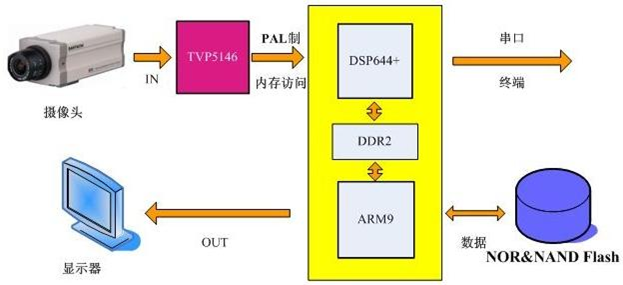
传感器智能和多传感器的动态切换控制(Sensor Intelligence and Swithcing Control of Multiple Sensors)