|
|
| |
| 智能变体飞行器系统项目: |
|
 |
|
背景简介: |
|
|
| |
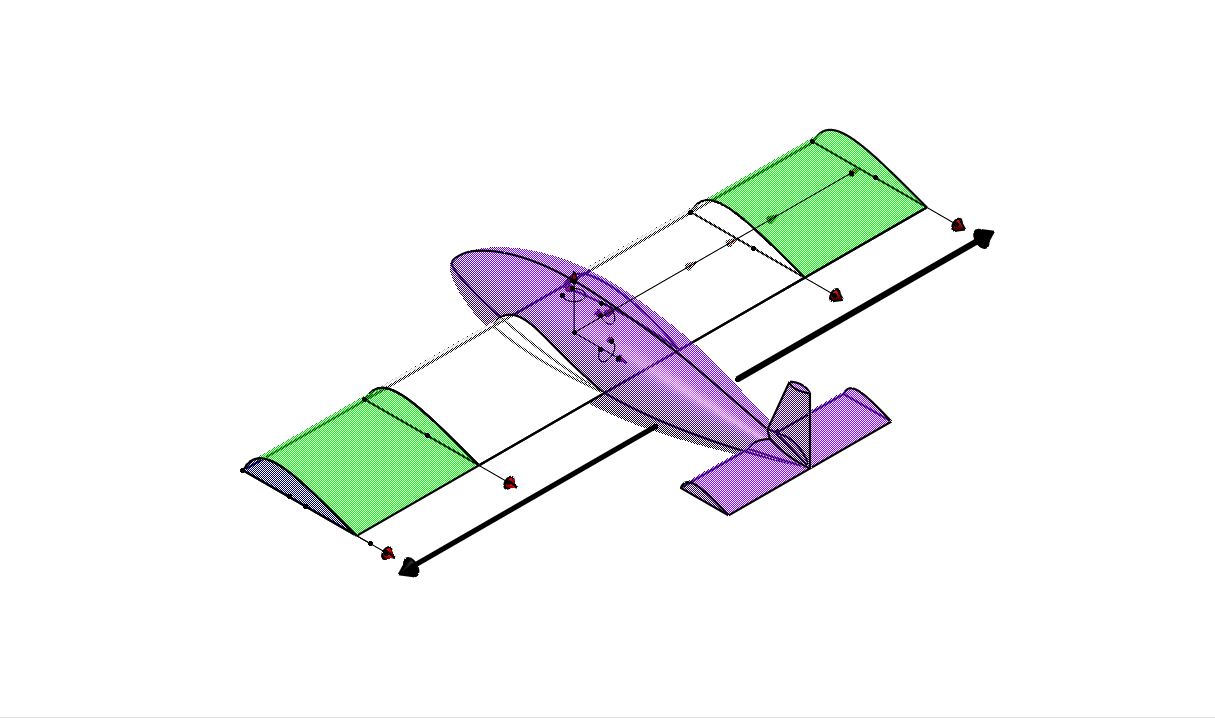
本项目来源于空间863某课题。传统飞行器的飞行效率、机动性以及任务/坏境的适应能力等特性在飞行器结构设计完成时就已经确定,这导致传统飞行器很难适应目前多任务复杂、环境多变等因素带来的影响。人们受鸟类的启发,提出了智能变形飞行器基本概念和研究体系,通过实时改变飞行器结构的几何和物理属性,来提高飞行器的效率、机动性和多环境/任务适应能力,达到全航程最优。在这一思想的启发下,我们开展了关于智能变体飞行器的建模与控制技术研究,通过研究智能飞行器结构特性,建立飞行任务、飞行环境和飞行器最优结构间的关系,并通过先进的高性能鲁棒运动控制技术,增强飞行器的干扰、震动抑制性能,提高飞行品质。
|
|
研究人员: |
|
|
| |
王 璐,于 哲 |
|
研究内容: |
|
|
| |
智能飞行器气动特性分析、建模与仿真技术;
智能飞行器结构优化技术;
智能飞行器的高性能伺服控制技术;
|
|
设计展望: |
|
|
| |
・针对智能变形飞行器,提出一系列完整的建模体系结构 |
|
| |
・搭建一套完整飞行实验平台,能够进行飞行试验 |
|
| |
・研究高性能鲁棒运动控制技术,增强飞行器的干扰、震动抑制性能 |
|
| |
|
|
|

